|
|
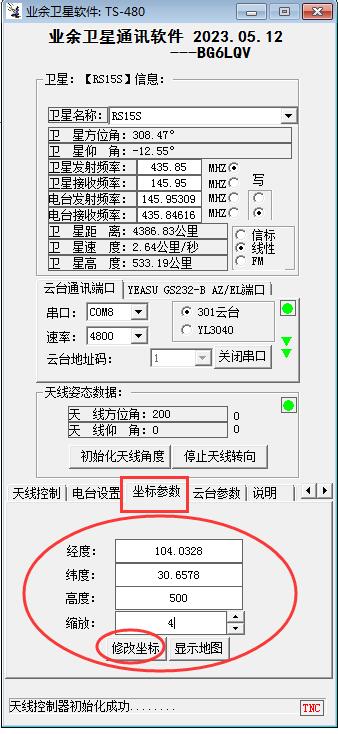
第二章: 软件调试篇 . 云台及PC控制软件调试(部分软件在二楼有链接可下载) 第一步: 给USB转485在PC上装上驱动,计算机设备管理器可查看新增的串口,并给串口上配置一个传输速率.(我这里是COM8端口,设置速率4800) 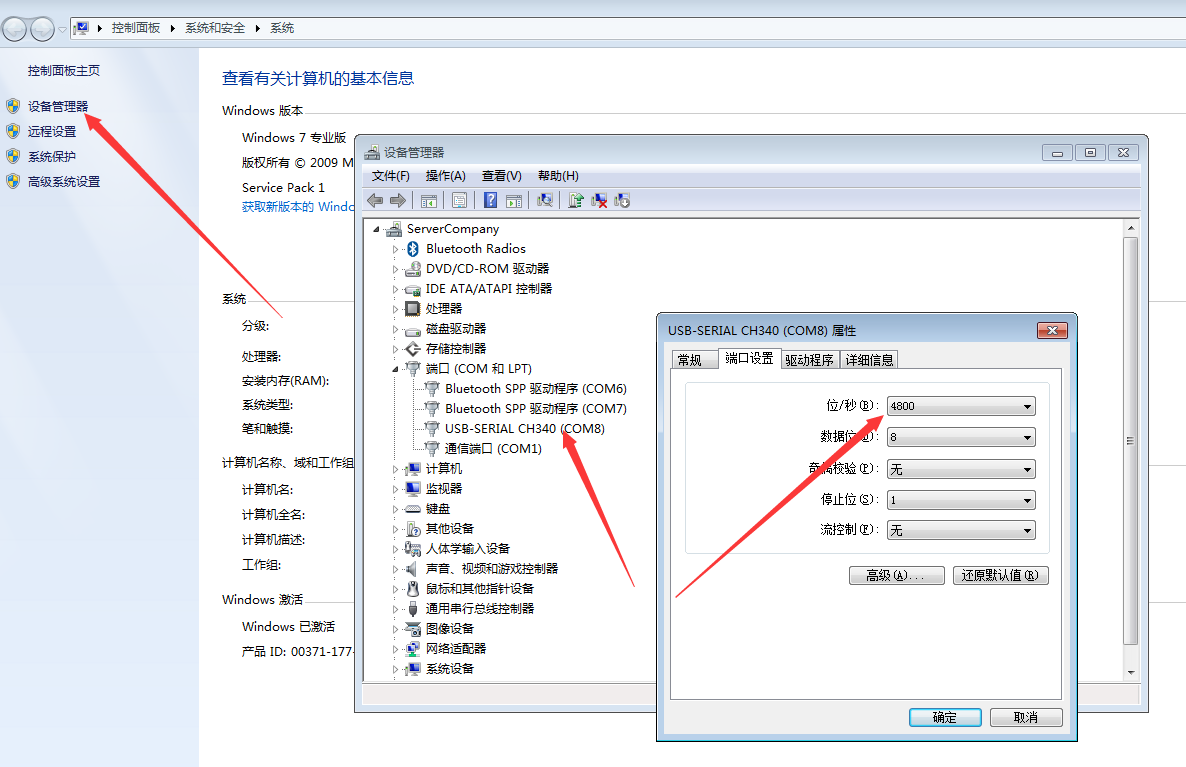 第二步:配置云台解码板地址.传输速率及使用协议 云台参数和结构: 第二步:配置云台解码板地址.传输速率及使用协议 云台参数和结构: 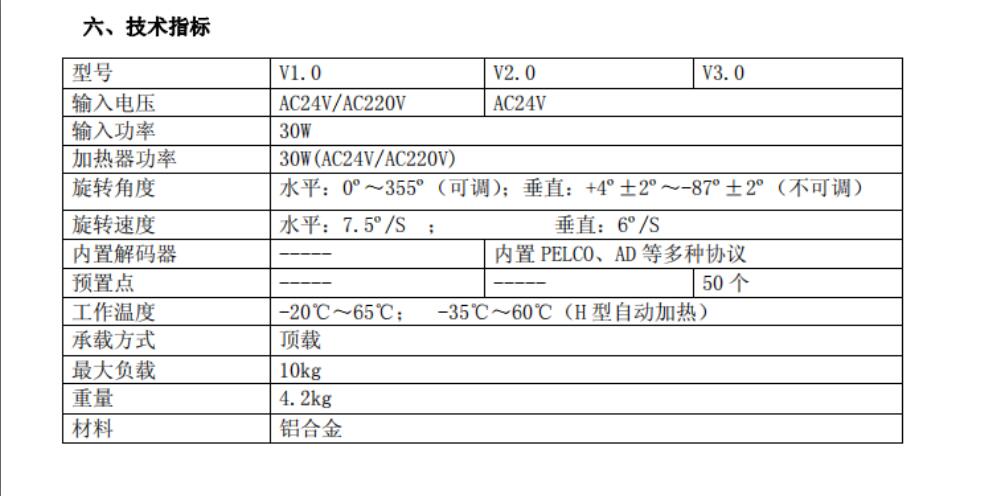 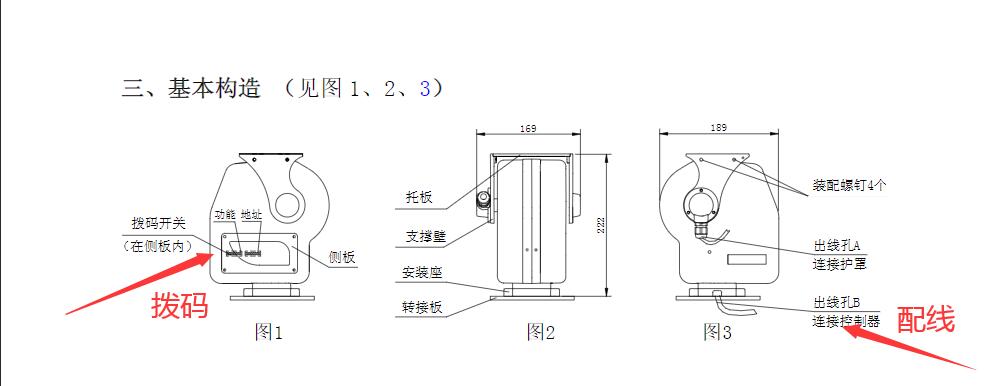 协议.地址码.比特率: 协议.地址码.比特率: 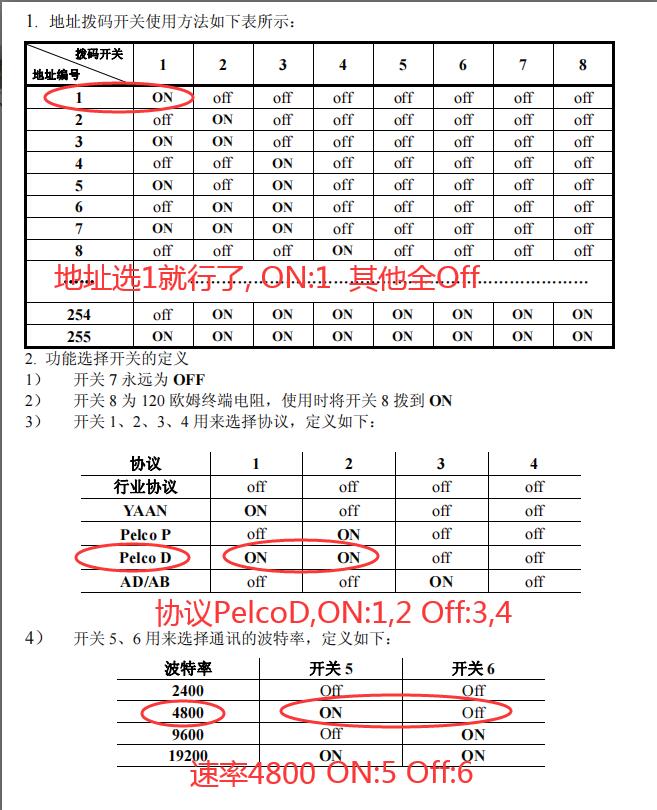 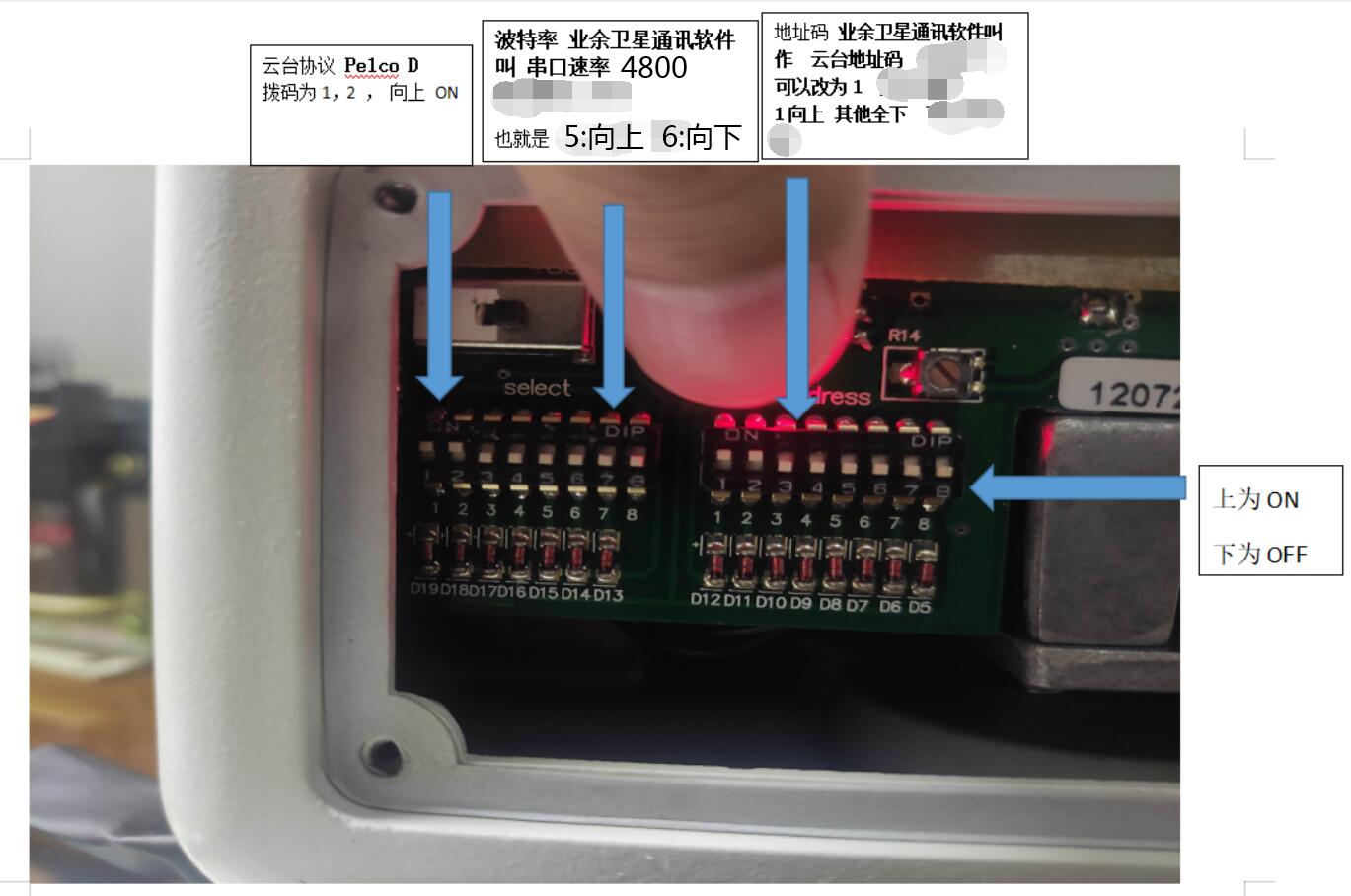 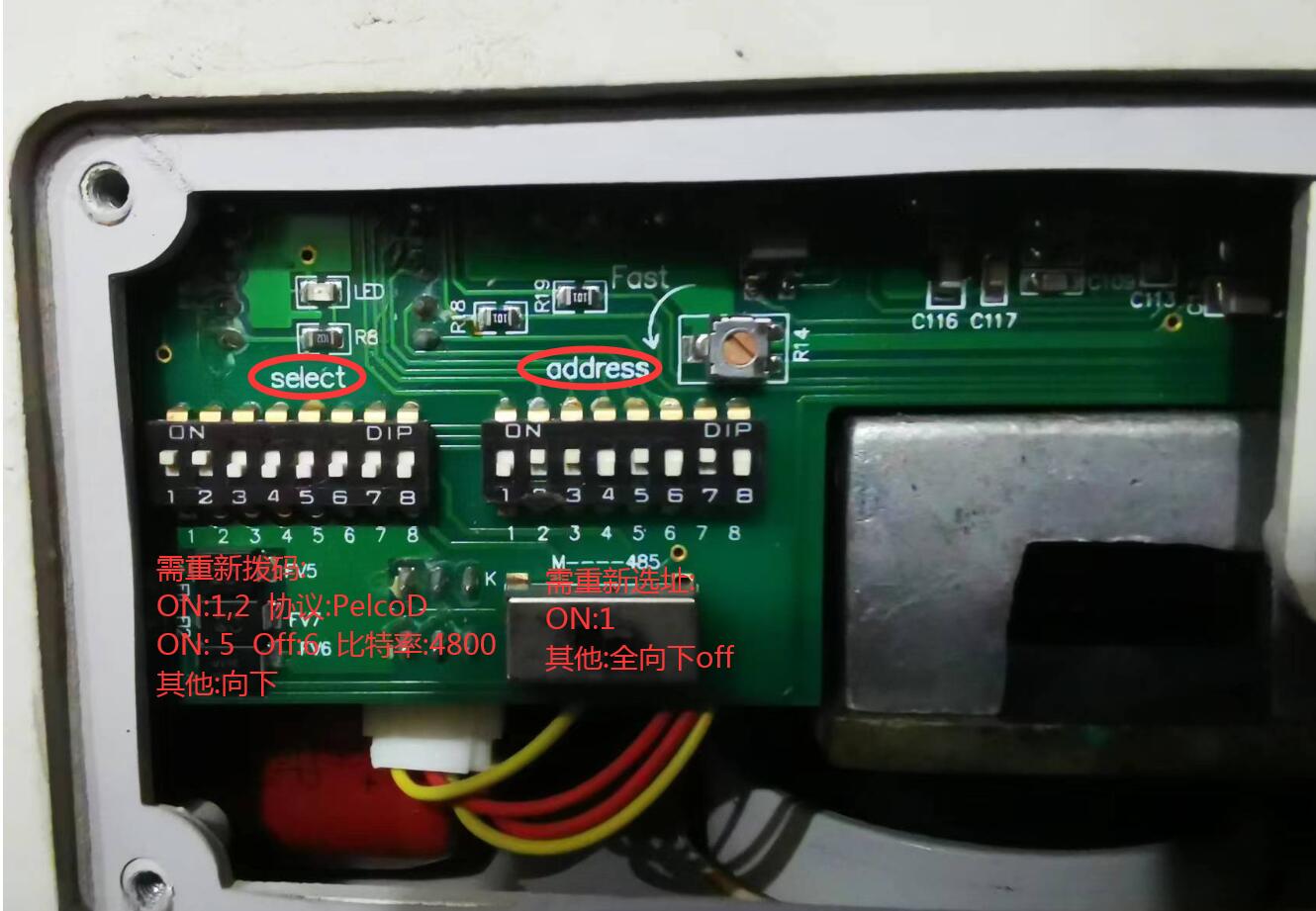 云台设置完了,就用通讯电缆里的两根连接到USB转485的A和B引脚,然后另两根连接AC24V电源,通电后云台立即开始自检,说明云台正常. 云台设置完了,就用通讯电缆里的两根连接到USB转485的A和B引脚,然后另两根连接AC24V电源,通电后云台立即开始自检,说明云台正常. 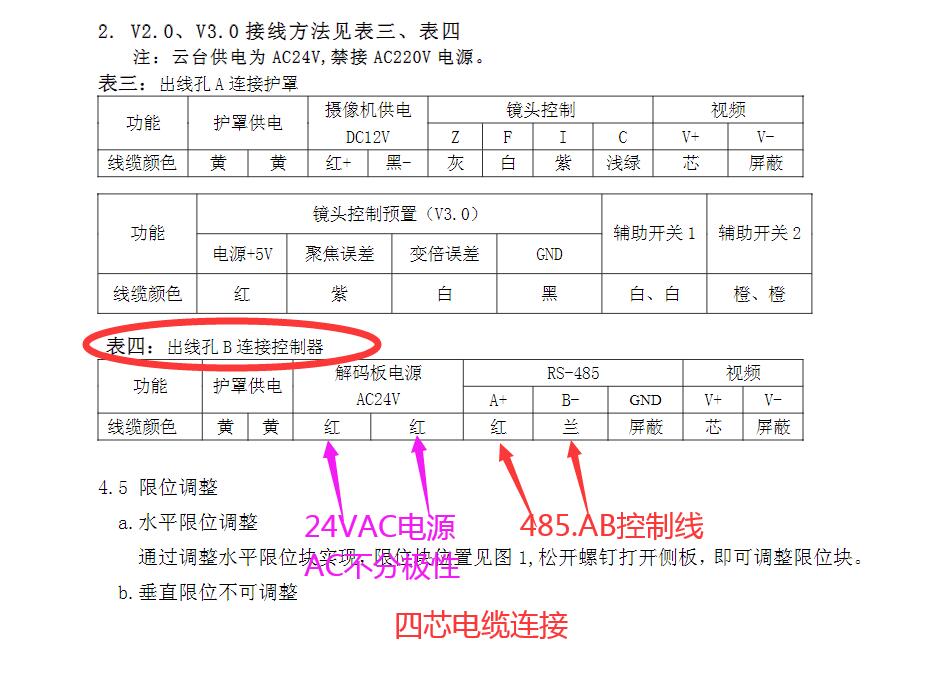 云台自检完成后, 就用云台控制软件来连接云台并设置一些参数 注意我们之前在云台上设置的速率和地址,要保持一致,端口号也和USB转485在设备管理器中的端口号一致,并且计算机设备管理器中COM端口的速率也要一样. 特别说明一下,不管你是那个型号的云台,都选301云台(3040的BG6LQV还没有完善) 云台自检完成后, 就用云台控制软件来连接云台并设置一些参数 注意我们之前在云台上设置的速率和地址,要保持一致,端口号也和USB转485在设备管理器中的端口号一致,并且计算机设备管理器中COM端口的速率也要一样. 特别说明一下,不管你是那个型号的云台,都选301云台(3040的BG6LQV还没有完善) 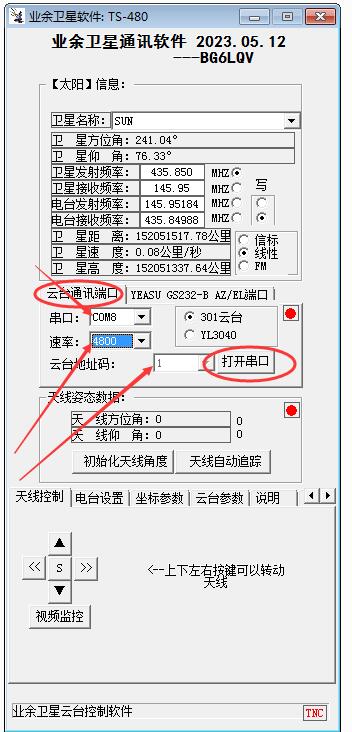 基本设置完成后,点击打开串口,然后依次点击初始化天线角度和天线自动追踪,如果这时云台在动作,那我们在通讯上也没有问题了,接下来就是软件上其他设置项了. 提示一下,初始化天线角度,需要一定时间,请耐心一点,一般是俯仰和水平分别进行,中间可能有稍长一丁点的等待,不要急,等下面状态栏提示完成后,就可以上下左右控制云台了. 基本设置完成后,点击打开串口,然后依次点击初始化天线角度和天线自动追踪,如果这时云台在动作,那我们在通讯上也没有问题了,接下来就是软件上其他设置项了. 提示一下,初始化天线角度,需要一定时间,请耐心一点,一般是俯仰和水平分别进行,中间可能有稍长一丁点的等待,不要急,等下面状态栏提示完成后,就可以上下左右控制云台了. 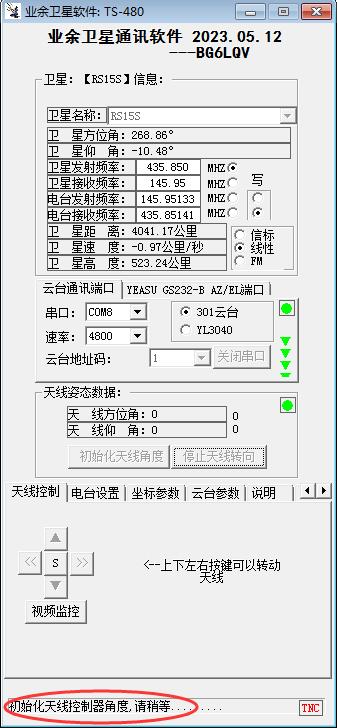 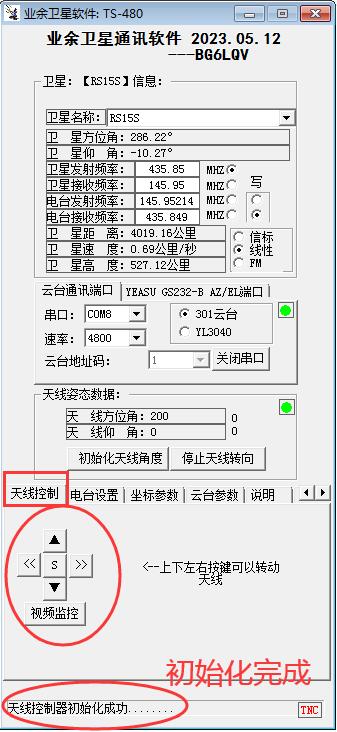 输入地理位置坐标和海拔高度,点击修改.完成设置 输入地理位置坐标和海拔高度,点击修改.完成设置
 设置云台参数: 注意这里水平参数和垂直参数其实是一个时间值就是云台每旋转1度需要的时间以毫秒为单位(毫秒/度) 最小仰角,水平为0不用填,最大仰角软件里有限制最大99,我这个云台实际能到110度左右,不过打星超过90度就没意义了,根据自己实际需要的情况填写.参数计算方法如下: 设置云台参数: 注意这里水平参数和垂直参数其实是一个时间值就是云台每旋转1度需要的时间以毫秒为单位(毫秒/度) 最小仰角,水平为0不用填,最大仰角软件里有限制最大99,我这个云台实际能到110度左右,不过打星超过90度就没意义了,根据自己实际需要的情况填写.参数计算方法如下: 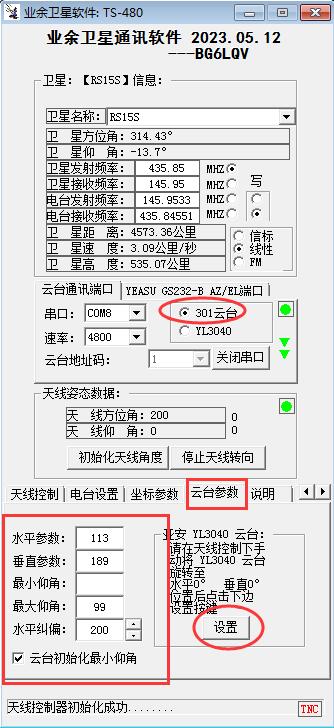 水平参数计算: 先将云台,按左 "<<" 转到限位停止后, 按住右 ">>" 持续按住不要松手,直到云台旋转到限位块停止立即松手,记录下如下图圈中的时间(ms) 水平参数= 时间(ms)/350(度) :如果你不清楚你的云台可水平旋转多大角度,可将云台的臂举到顶,打开手机的指南针功能放在云台上就可以测量,虽然壳体是铝的,但电子罗盘受干扰还是有一点影响,可以参考一下. 垂直参数也是一样设置方法., 把手机捆在云台举升板上,打开手机上的测倾斜角度的软件,先按住向下键放到底,记下这里的仰角,然后持续按住向上不要松手,到顶后停止时立即松开,记录下所用时间(ms)和此时的仰角,计算一下,实际俯仰转动的角度,可以多测几次. 垂直参数=时间(ms)/俯仰角度 水平纠偏=天线的方向角(在室外把云台架设好后,并水平向左 "<<" 转动云台到底,此时天线实际指向的方位角,可以站远一点,用手机实测,也可以用太阳投影法测量,需要借助软件Orbitron,具体方法传送门: 用太阳的方位角校正旋转器和天线方向 ) 水平参数计算: 先将云台,按左 "<<" 转到限位停止后, 按住右 ">>" 持续按住不要松手,直到云台旋转到限位块停止立即松手,记录下如下图圈中的时间(ms) 水平参数= 时间(ms)/350(度) :如果你不清楚你的云台可水平旋转多大角度,可将云台的臂举到顶,打开手机的指南针功能放在云台上就可以测量,虽然壳体是铝的,但电子罗盘受干扰还是有一点影响,可以参考一下. 垂直参数也是一样设置方法., 把手机捆在云台举升板上,打开手机上的测倾斜角度的软件,先按住向下键放到底,记下这里的仰角,然后持续按住向上不要松手,到顶后停止时立即松开,记录下所用时间(ms)和此时的仰角,计算一下,实际俯仰转动的角度,可以多测几次. 垂直参数=时间(ms)/俯仰角度 水平纠偏=天线的方向角(在室外把云台架设好后,并水平向左 "<<" 转动云台到底,此时天线实际指向的方位角,可以站远一点,用手机实测,也可以用太阳投影法测量,需要借助软件Orbitron,具体方法传送门: 用太阳的方位角校正旋转器和天线方向 ) 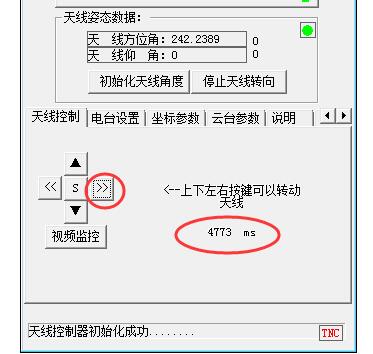 此软件不需要其他星历的支持,它自己启动会联网更新星历,也可以计算多普勒控制电台,不过设计者是设计的两部电台的使用,RIG1只支持发射频率写入,RIG2只接受接收频率写入,如果你只是一部电台,软件只能控制一项,要么发射,要么接收,需要在一部电台实现VFOA ,VFOB分别控制,就要用其他软件来实现,见后续章节. 此软件不需要其他星历的支持,它自己启动会联网更新星历,也可以计算多普勒控制电台,不过设计者是设计的两部电台的使用,RIG1只支持发射频率写入,RIG2只接受接收频率写入,如果你只是一部电台,软件只能控制一项,要么发射,要么接收,需要在一部电台实现VFOA ,VFOB分别控制,就要用其他软件来实现,见后续章节. 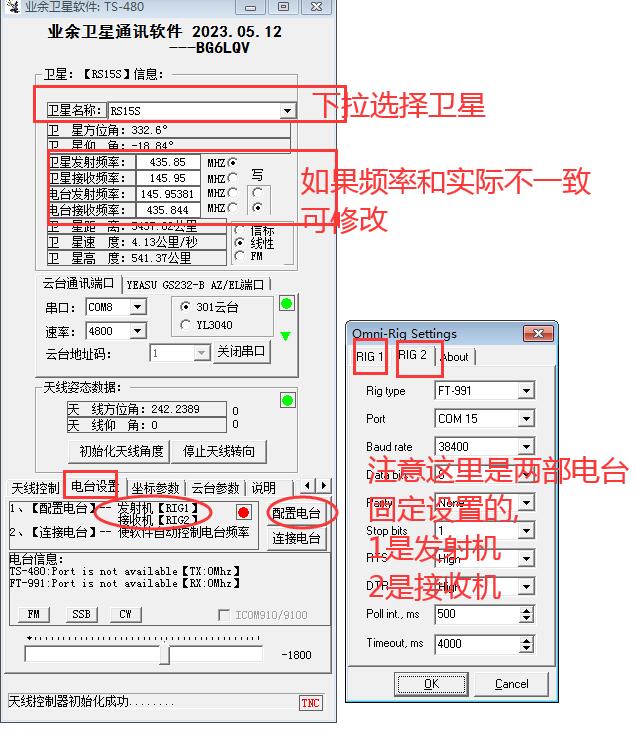 至此,计算机控制云台这一块我们就设置完了,就可以开始享受愉快的追星通联了,但折腾无止境,继续....... 手机云台控制 再提一下手机控制软件使用,那就要拿出我们上一楼蓝牙转485模块.从个人使用上来看,在户外带这些纯属折腾,不怕麻烦就行 至此,计算机控制云台这一块我们就设置完了,就可以开始享受愉快的追星通联了,但折腾无止境,继续....... 手机云台控制 再提一下手机控制软件使用,那就要拿出我们上一楼蓝牙转485模块.从个人使用上来看,在户外带这些纯属折腾,不怕麻烦就行  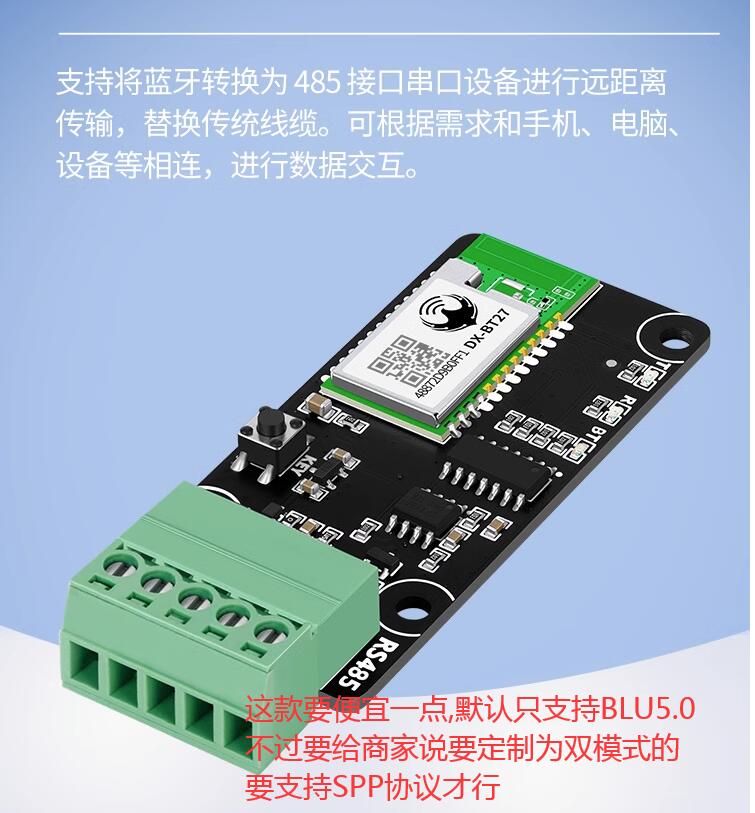 一定要注意蓝牙485的传输速率,一定要设置为跟云台中解码上设置的速率一致,这个模块默认速率是9600,之前我们设置云台速率为4800,所以需要更改一下,更改蓝牙模块的速率,需要用到之前计算机控制云台的的USB转485. 一定要注意蓝牙485的传输速率,一定要设置为跟云台中解码上设置的速率一致,这个模块默认速率是9600,之前我们设置云台速率为4800,所以需要更改一下,更改蓝牙模块的速率,需要用到之前计算机控制云台的的USB转485.  将两个模块的485端AB脚 A-->A,B-->B用电线连接起来,再给蓝度模块485输入一个5-30V的DC电源,在计算上用串口调试工具,发送模块的控制字令来更改传输速率,工具集一般商家会提供给你. 将两个模块的485端AB脚 A-->A,B-->B用电线连接起来,再给蓝度模块485输入一个5-30V的DC电源,在计算上用串口调试工具,发送模块的控制字令来更改传输速率,工具集一般商家会提供给你. 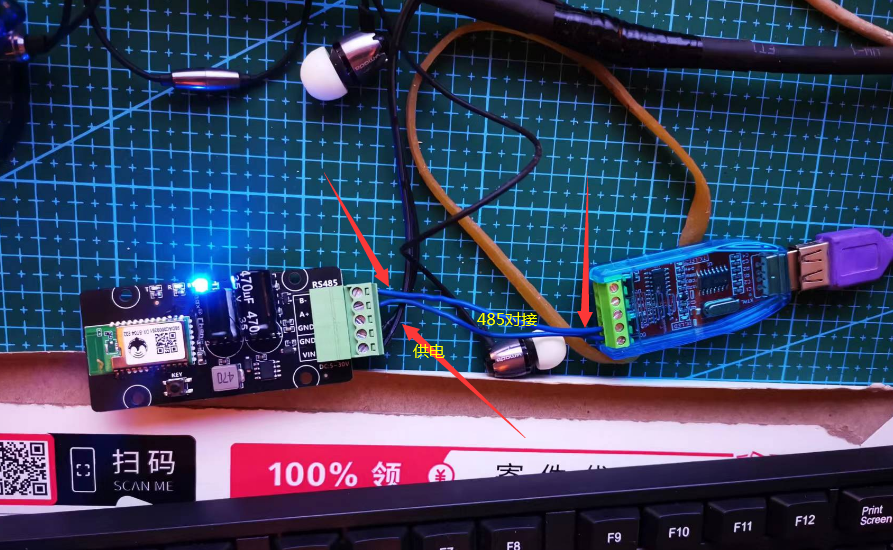 蓝度模块配置好后,就可以用电缆连接云台了,连接方法,跟之的USB485连接方法差不多,只是有一点电源的要求,在户外使用时,一般都是带的12VDC电源, 蓝牙485我购的5-30V宽电压的,但云台为24VAC,需要一个升压模块. 蓝度模块配置好后,就可以用电缆连接云台了,连接方法,跟之的USB485连接方法差不多,只是有一点电源的要求,在户外使用时,一般都是带的12VDC电源, 蓝牙485我购的5-30V宽电压的,但云台为24VAC,需要一个升压模块.
DC12V 转 AC24V逆变电源.  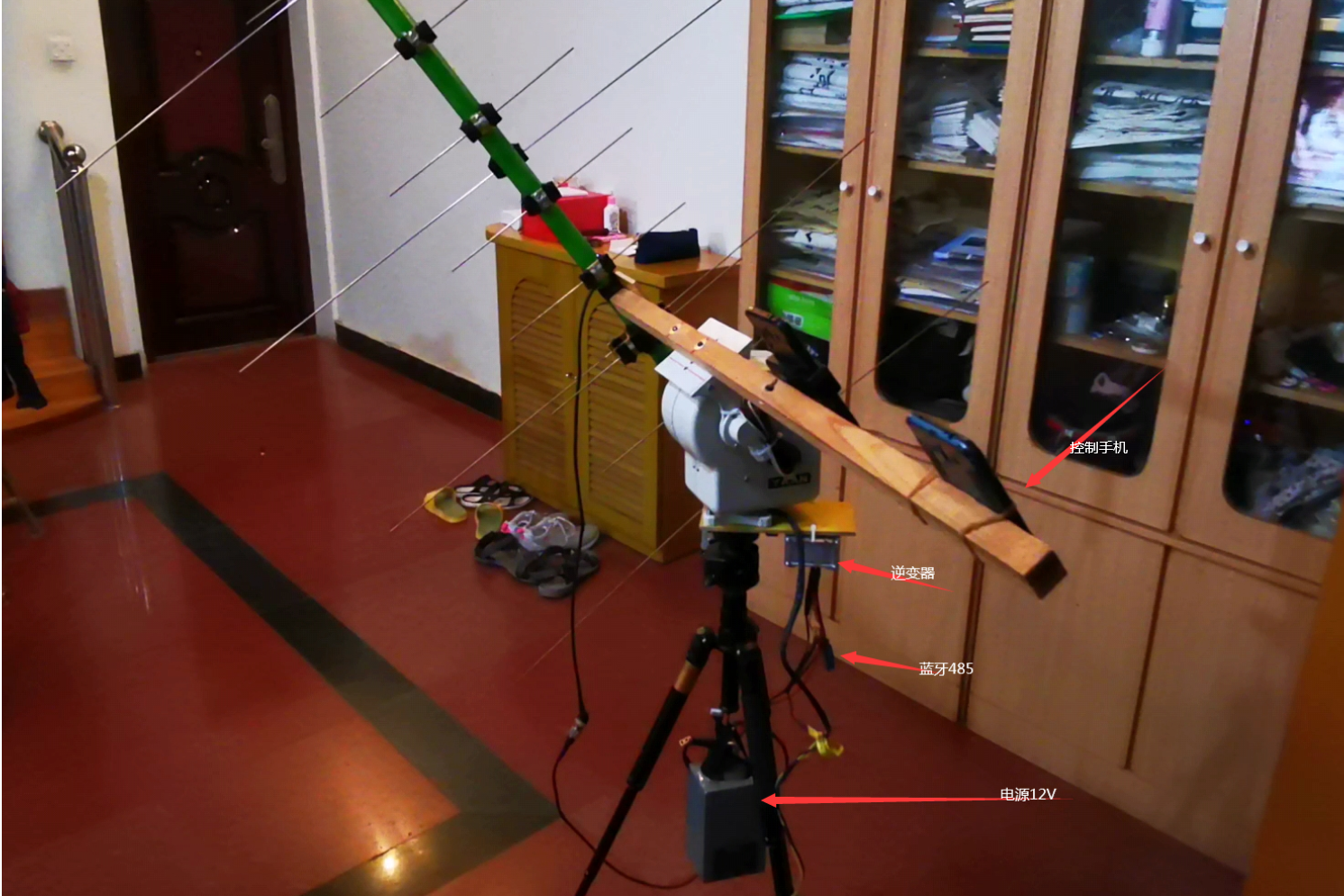 手机上先开启蓝牙连接蓝牙模块 手机上先开启蓝牙连接蓝牙模块  然后打开追星软件进行连接,手机追星软件是借助手机自身的GPS和陀螺仪来调节云台的方位角和俯仰角,只需要将手机和天线固定在一个指向方向就行了,其他就连接后,他会自动跟踪我们所选卫星. 然后打开追星软件进行连接,手机追星软件是借助手机自身的GPS和陀螺仪来调节云台的方位角和俯仰角,只需要将手机和天线固定在一个指向方向就行了,其他就连接后,他会自动跟踪我们所选卫星.  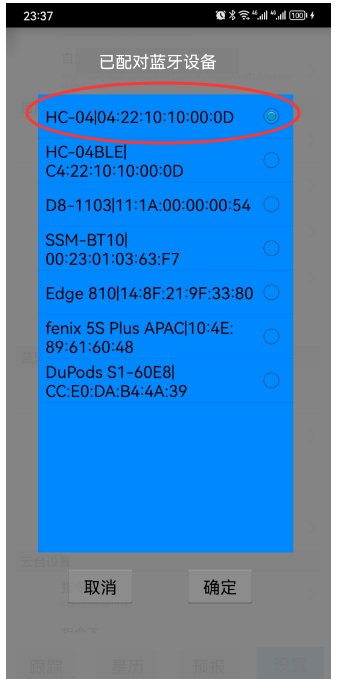 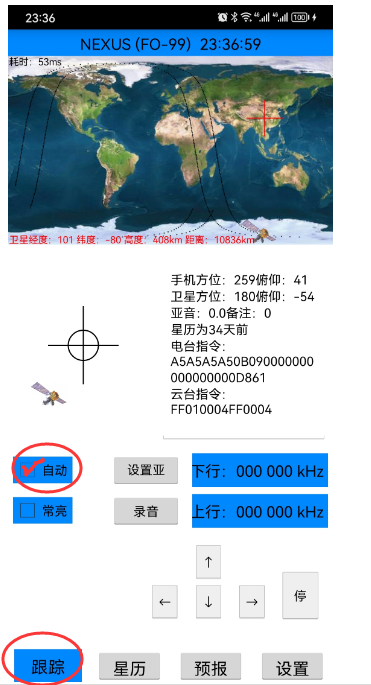 至此,手机控制云台这一块也设置完了,就可以开始享受愉快的追星通联了,但折腾无止境,下楼继续....... 至此,手机控制云台这一块也设置完了,就可以开始享受愉快的追星通联了,但折腾无止境,下楼继续....... [ 此帖被bd8alx在2023-06-30 23:49重新编辑 ]
|

