(三)160米Loop架设准备 由于需要在四个楼之间架设天线,所以如何把振子导线拉过去,是工程实施方面的关键。根据总平面图,馈电点在A点,所以主要的施工平台在A点的顶楼露台。

正式拉振子线之前,需要先在A楼至B、C、D三个楼之间各拉一条临时横渡线。方案如上图。
为方便隐蔽架设和节约成本考虑(横渡线是一次性的),所以选择了直径0.13mm、拉力值8kg的大力马线,1000米39元。
**方案一:** 最原始的方法,取名为VU拉线法。以AB两楼为例,具体方案如下:
1. 出于安全考虑,用水袋作为配重,从A楼楼顶垂下一条线。用一个尼龙带装个一斤左右的水,打结用双套结系紧即可。下垂时速度较快,绳子很细,注意不要割伤手。
2. 将从楼顶下垂到地面的线斜拉至两楼中点处临时固定,需要注意行走线路,绕开树木等容易勾住的东西, 也要避免行人碰到绳子。
3. 同样,从B楼也垂下一根线,拉到A楼下垂线的位置,尽量绷紧后,将两根绳子用八字结连接好,此时两个绳子呈V字形。
4. 松开绳子后,如果上空没有遮挡,受绳子拉力和自重,打结处会自然上升,从V字形变成U字形,不会影响到行人。
5. 稳稳地上楼顶,收紧绳子。
6. 以此类推,完成AC、AD两个楼之间的临时横渡线。
**方案二:** 用无人机飞渡,我使用的无人机是大疆Air 4。具体方案如下:
1. 无人机下方需要增加配重,我用的是一颗M15的螺帽,使用一根0.6mm的大力马线牢牢地固定在无人机下方,以防坠落。拉线长度长约1.5米,太短了无人机无法降落,因为它会以为下方有阻挡物。
2. 将需要横渡的拉线(0.13mm细线)接在配重的位置。
3. 配重,需要使用活结绑在无人机上,在无人机快要降落时,用拉一下活结的另外一端,就自然与配重分离。这样做的目的是防止无人机降落时,机翼被绳子缠住(第一次被缠了一次,故如此改进)。
4. 无人机需要设置一下,即当没有信号时,原地悬停。 默认设置是返航,这样设置的目的是为了单人在两个楼间跑导致遥控信号中断时,无人机不会重新返航。若是两个人合作,那可以省去此步骤。
5. 准备好之后,把无人机原地上升至足够高度(两个楼之间是50米,我上升至60米)。
6. 把无人机飞向对面的楼,并下降至楼面上方3米左右的位置悬停。
7. 在对面的楼顶,接下配重和横渡线,并临时固定好。
8. 稳稳地降落无人机。
9. 将横渡线收紧。
最终实施的时候,AB之间使用无人机飞渡,AC之间采用VU拉线法。AD之间此前架设80米Loop时,已经有横渡线。
(四)正式架设有了80米Loop的架设经验,160米环的架设就更加快捷了。
1. Loop四个角与连接绳的固定。 既然已经通过固定点和连接线的长度确定环的形状,那么四个角应该是可滑动的,这样就能在收紧连接绳情况下,自动绷紧Loop的四个边。所以,连接处应该是自由滑动的。 但是,如果增加滑轮,不仅会增加环的重量,也会减弱了隐蔽性。由于大力马绳和特氟龙都具有超强的润滑性,所以,我大胆地直接把大力马绳圈套在特氟龙外皮的振子导线上。
2. 确定连接绳的长度。由于四个固定角和连接绳的长度决定的环的形状,经过测算,四个角的连接绳的长度分别是:27、26.24、9.51、10.2米,所以我提早准备了两条30米和15米长的0.6mm直径的连接线。
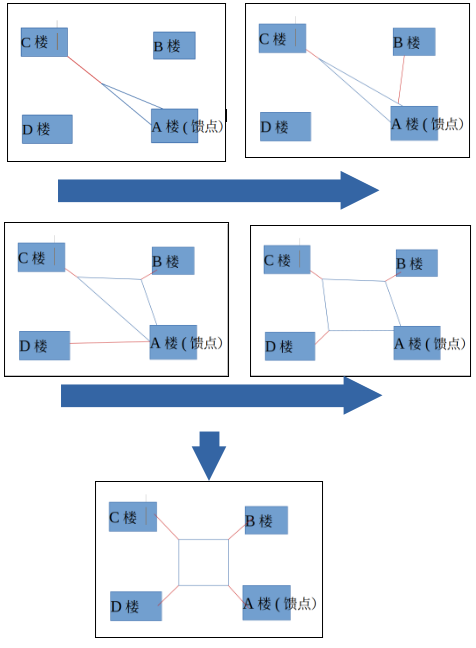
3. 振子导线横渡方案是:- 固定导线的一端在A点,从线的中间连接一个绳环,连接至C点的临时横渡线。
- 横渡AC两点,形成A-C,再C-A的一个水平倒V形状。
- 再连接B点的连接线,横渡至B点。形成一个A-B-C-A环。
- 在连接D点的连接线,横渡至D点,形成一个ABCDA的环。
- 最后根据计算好的连接线长度,调整四个角的连接线实际长度。
- 完成固定CD两个点的振子线, B点的连接线预留长一点,因为还要在A点连接馈电点。
- 待馈电点完成连接之后,收紧B点的连接线。
- 环架设初步完成。具体过程见下图。
4. 振子线的“重力牵引法“。 当把振子线向B、C、D点横渡时,最好是两人协助。但是我考虑尽量低调,所以全程都是一个人操作。我采取的方法是“重力牵引法”,即在临时横渡线的B、C、D端分别增加一个滑轮,并在临时横渡线上接一个水袋,让水袋自然下垂。当需要横渡式,松开A端的固定点,对端在滑轮和水袋重力的作用下,自然会产生拉力,将振子线牵引过去。这里需要注意的是,水袋要离开墙面一点,要不然水袋可能会被墙壁磨破漏水,造成牵引失败。
Pasted image 20251125105720.png
[待续]
[ 此帖被bg5fri在2025-11-25 11:02重新编辑 ]

